
品牌故事
 https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/csm_Project_Area2_efe02a252c.jpg
675
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-11-27 12:52:252024-01-05 10:35:17普尔世新总部
https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/csm_Project_Area2_efe02a252c.jpg
675
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-11-27 12:52:252024-01-05 10:35:17普尔世新总部 https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/csm_Gruppenfoto.jpg
730
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-09-22 13:42:182024-03-15 14:38:07还原魔方机器人
https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/csm_Gruppenfoto.jpg
730
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-09-22 13:42:182024-03-15 14:38:07还原魔方机器人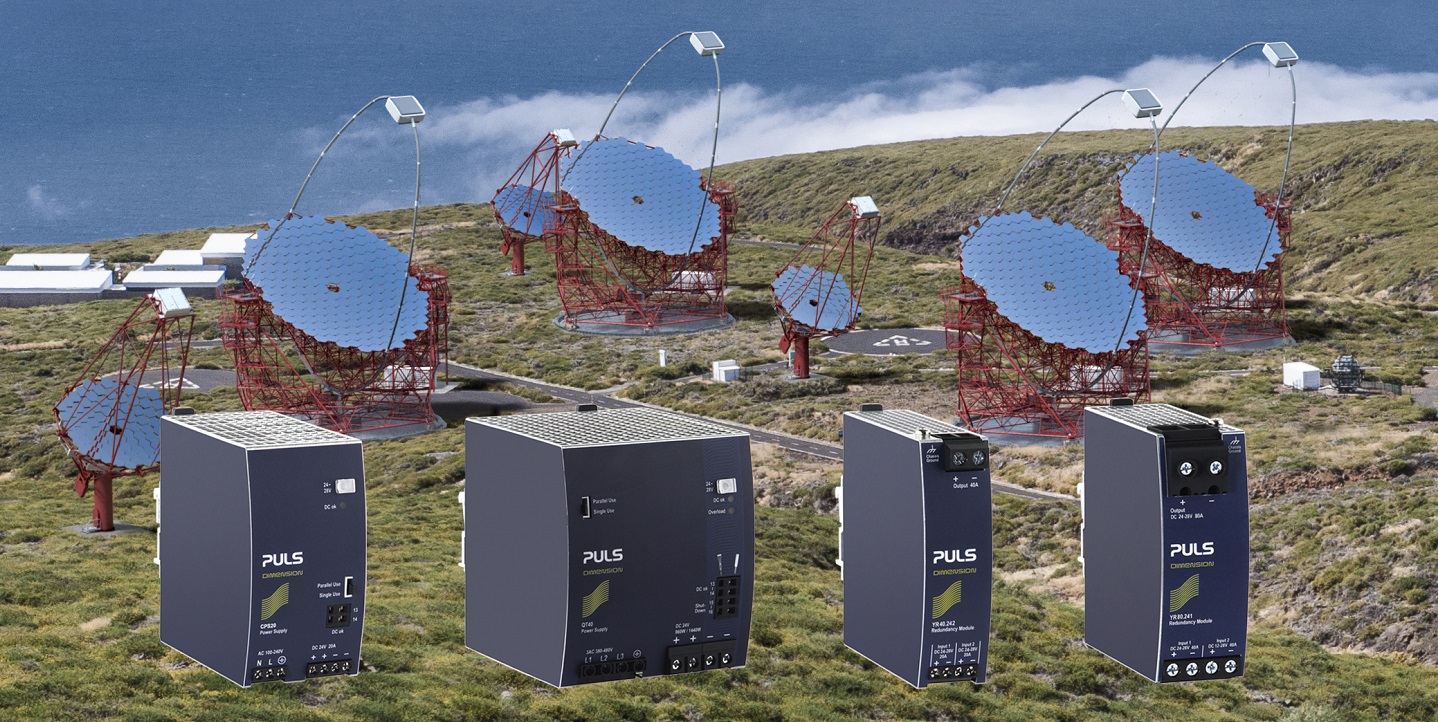 https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/CTA_PULS_mit_Geraeten_V3.jpg
722
1438
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-09-22 13:42:152024-01-26 15:31:35可靠的望远镜电源
https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/CTA_PULS_mit_Geraeten_V3.jpg
722
1438
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-09-22 13:42:152024-01-26 15:31:35可靠的望远镜电源 https://www.pulspower.cn/wp-content/uploads/sites/2/2023/09/csm_PULS-images-application-Racing_6_small_final_2_a659146187.jpg
476
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-09-13 12:01:282024-03-15 14:34:53赛车上的电源
https://www.pulspower.cn/wp-content/uploads/sites/2/2023/09/csm_PULS-images-application-Racing_6_small_final_2_a659146187.jpg
476
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-09-13 12:01:282024-03-15 14:34:53赛车上的电源 https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/csm_UnternehmerTUM_MakerSpace_GmbH_credit_Patrick_Ranz__20__header3_77b6809b01.jpg
557
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-08-31 16:53:532024-03-15 14:34:25适合创客的电源
https://www.pulspower.cn/wp-content/uploads/sites/2/2023/08/csm_UnternehmerTUM_MakerSpace_GmbH_credit_Patrick_Ranz__20__header3_77b6809b01.jpg
557
1440
econsor
/wp-content/uploads/sites/2/2023/07/logo_website.png
econsor2023-08-31 16:53:532024-03-15 14:34:25适合创客的电源